EC機(jī)器人抖動(dòng)問題處理
1. 簡(jiǎn)介
本文將介紹如何排查機(jī)器人抖動(dòng)問題及處理。
2. 操作流程
2.1 機(jī)器人螺絲松動(dòng)

2.2 設(shè)置負(fù)載數(shù)據(jù)不正確
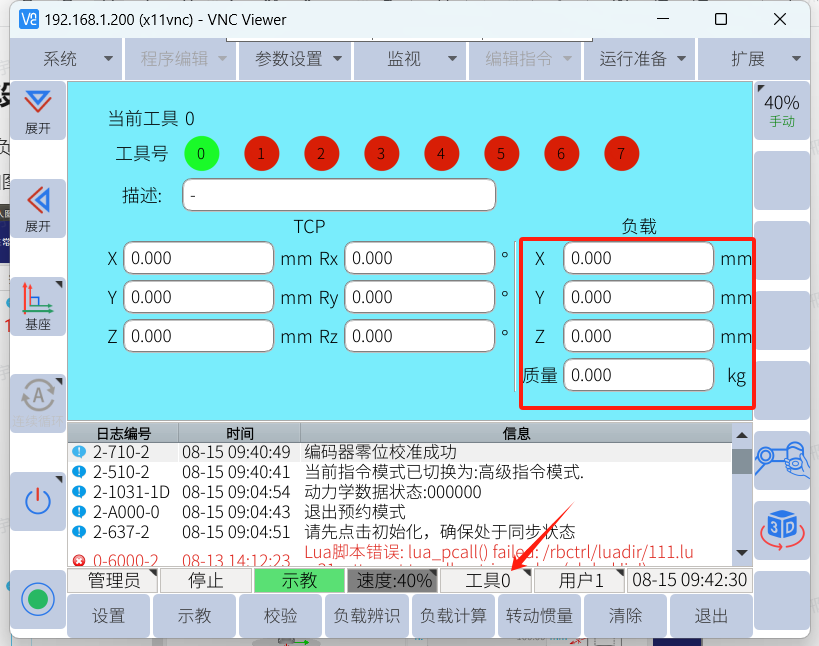
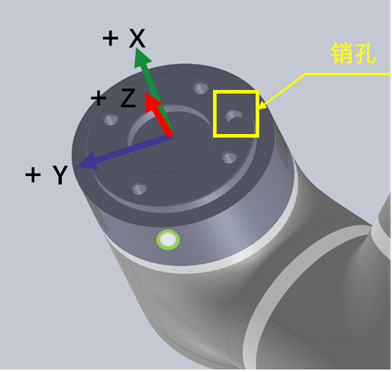
對(duì)于重心設(shè)置默認(rèn)在法蘭盤中心位置,可查看銷孔位置以辨別出末端工裝的重心是朝向那個(gè)方向,從而設(shè)置對(duì)應(yīng)的參數(shù)。
2.3 速度設(shè)定不合理
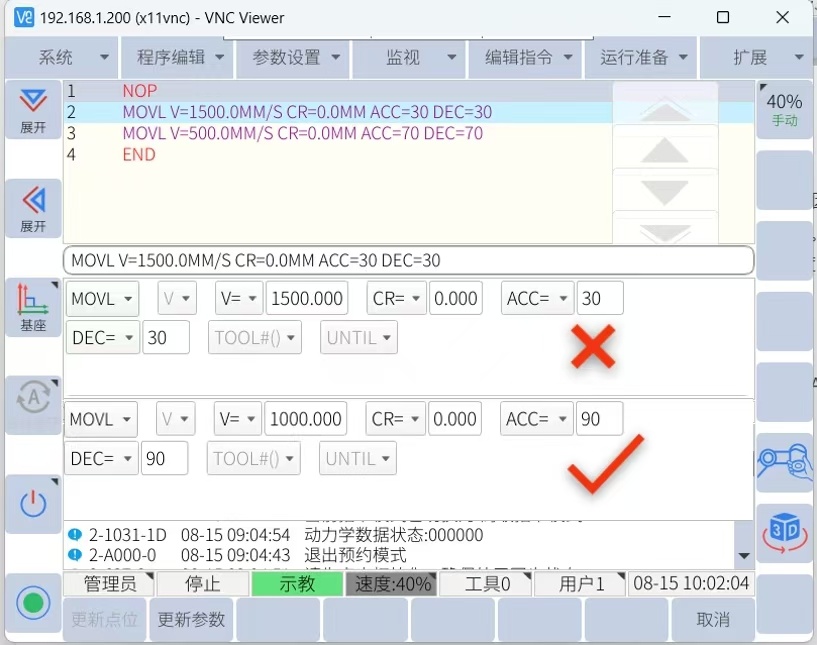
速度設(shè)置不合理會(huì)造成機(jī)械手運(yùn)動(dòng)不流暢,或加速度變化過大引起機(jī)器人震動(dòng),因此,在機(jī)器人速度設(shè)置中要合理,直線速度建議加速度ACC最大95 ,速度最大1500mm/s 。 建議最大關(guān)節(jié)速度VJ 95,關(guān)節(jié)加速度ACC最大95(應(yīng)當(dāng)根據(jù)兩點(diǎn)距離來調(diào)整速度與加速度,才能達(dá)到最優(yōu)速度)如下圖所示:
如果第一次接觸艾利特機(jī)器人,對(duì)速度沒有完全理解可以參考以下推薦速度參數(shù)。
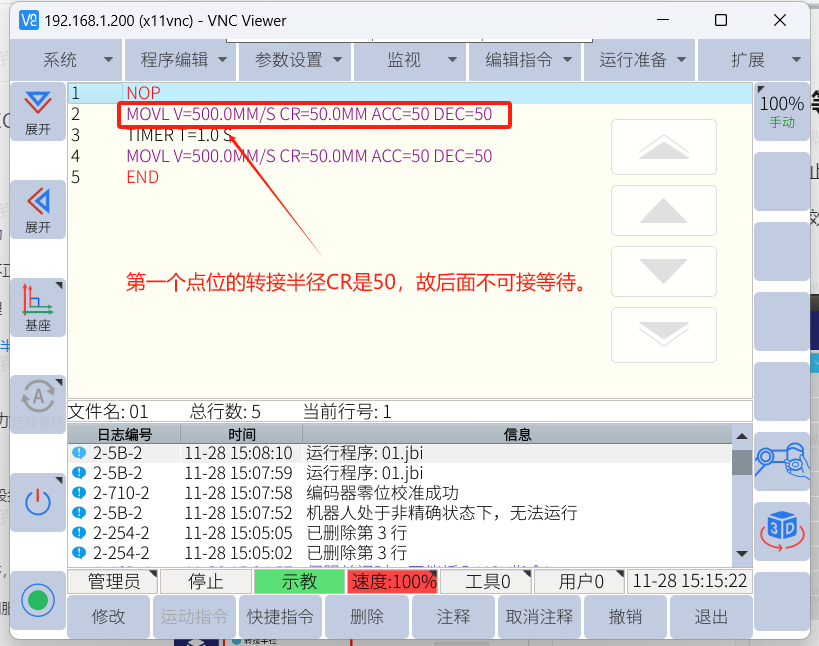
2.4 CR(轉(zhuǎn)接半徑)不為0 ,且后面有時(shí)間等待或者條件等待
當(dāng)CR不為0 ,且后面有延時(shí)或者條件等待時(shí),機(jī)器人會(huì)轉(zhuǎn)彎時(shí)快速停止 ,就可能造成抖動(dòng)或者出現(xiàn)其他報(bào)警 ,長(zhǎng)期這樣也會(huì)對(duì)減速器損傷。如圖所示:
2.5 本體碰撞硬件損壞
按住示教器背面的自由驅(qū)動(dòng)按鈕或點(diǎn)擊操作選項(xiàng)卡的“拖動(dòng)”,手動(dòng)拖動(dòng)每個(gè)軸檢查是否有卡頓,無卡頓建議從2.1-2.4步驟進(jìn)行排查,有卡頓大概率為碰撞導(dǎo)致諧波減速機(jī),交叉滾子軸承損壞,需聯(lián)系艾利特相關(guān)人員進(jìn)行本體的維修。
3. 自適應(yīng)振動(dòng)抑制功能(需在艾利特技術(shù)人員帶領(lǐng)下執(zhí)行)
如果通過以上方法未排除出抖動(dòng)原因且手動(dòng)手動(dòng)拖動(dòng)無卡頓且機(jī)器人運(yùn)動(dòng)軌跡抖動(dòng),可以試試通過自適應(yīng)振動(dòng)抑制功能使機(jī)器人減少抖動(dòng)。
自適應(yīng)振動(dòng)抑制功能:可以在一定程度上抑制運(yùn)行過程中出現(xiàn)的持續(xù)抖動(dòng),操作步驟如下:
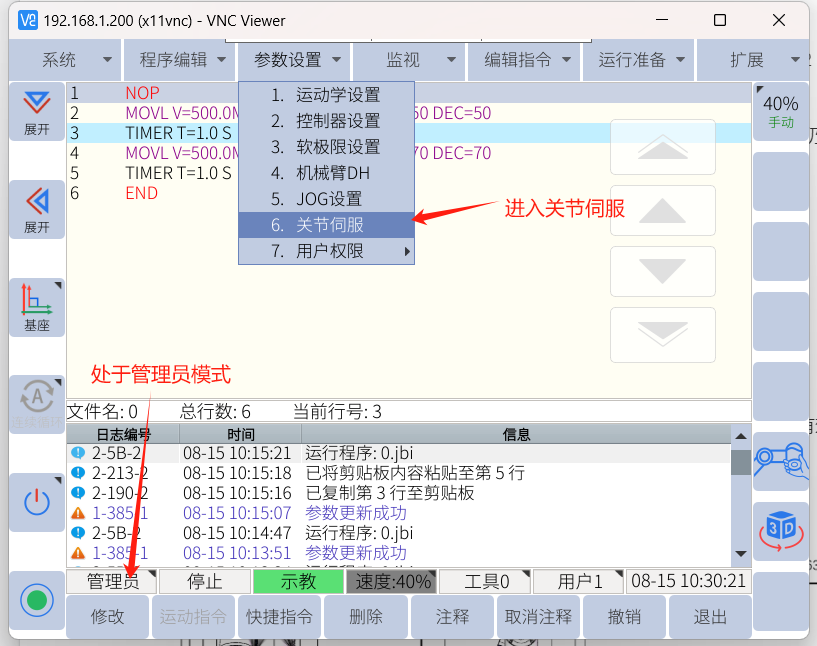
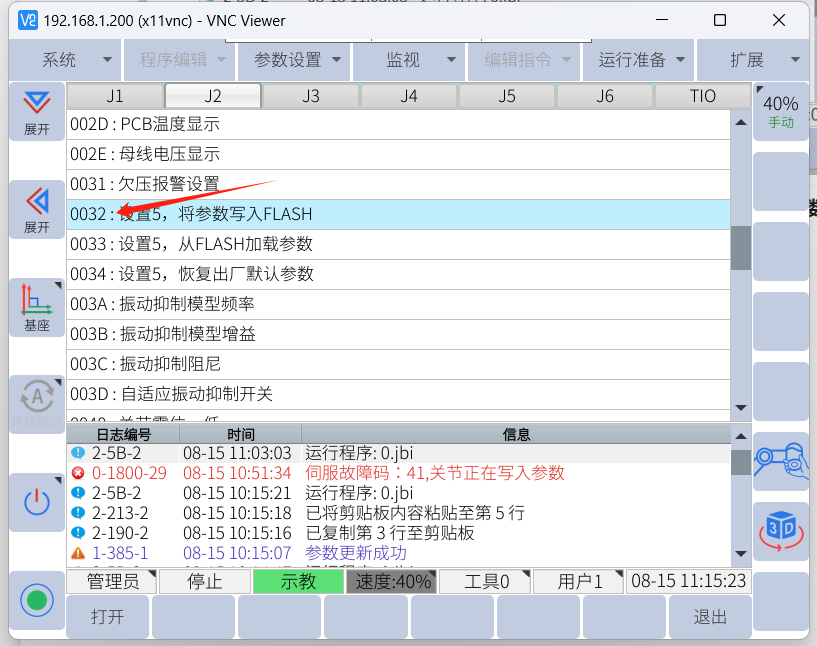
1. 進(jìn)入關(guān)節(jié)伺服
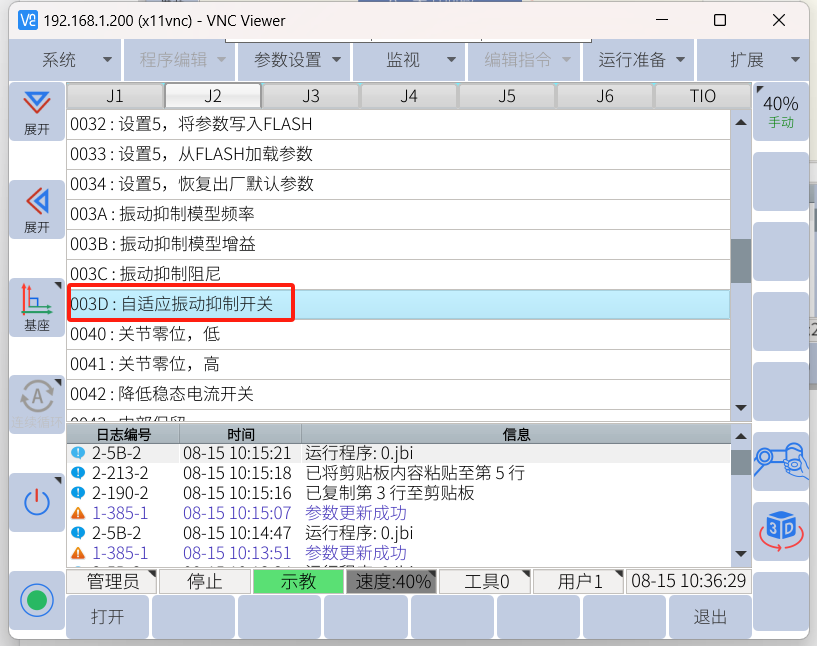
2. 找到003D,一般抖動(dòng)牽連的關(guān)節(jié)是J2和J3較多,可僅打開這兩個(gè)關(guān)節(jié)的震動(dòng)抑制功能。
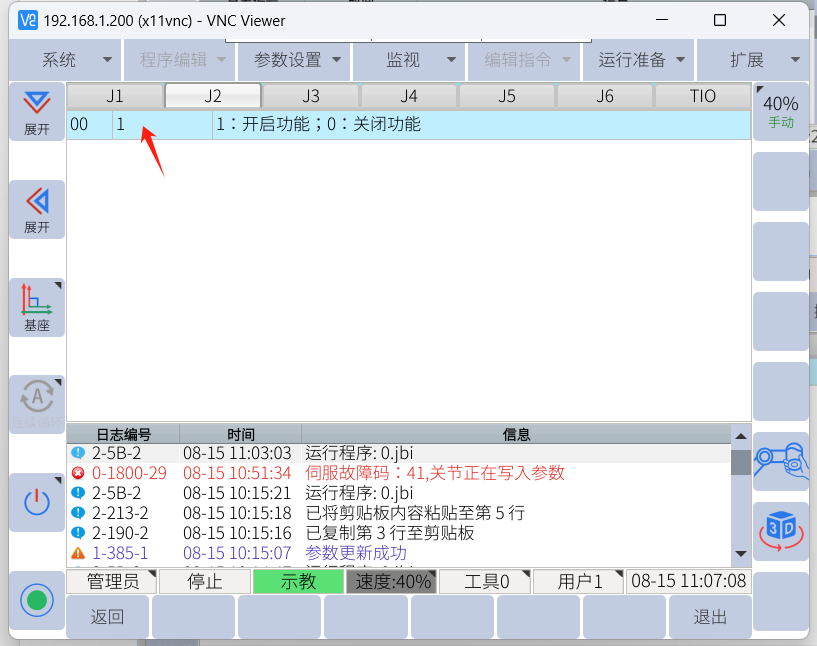
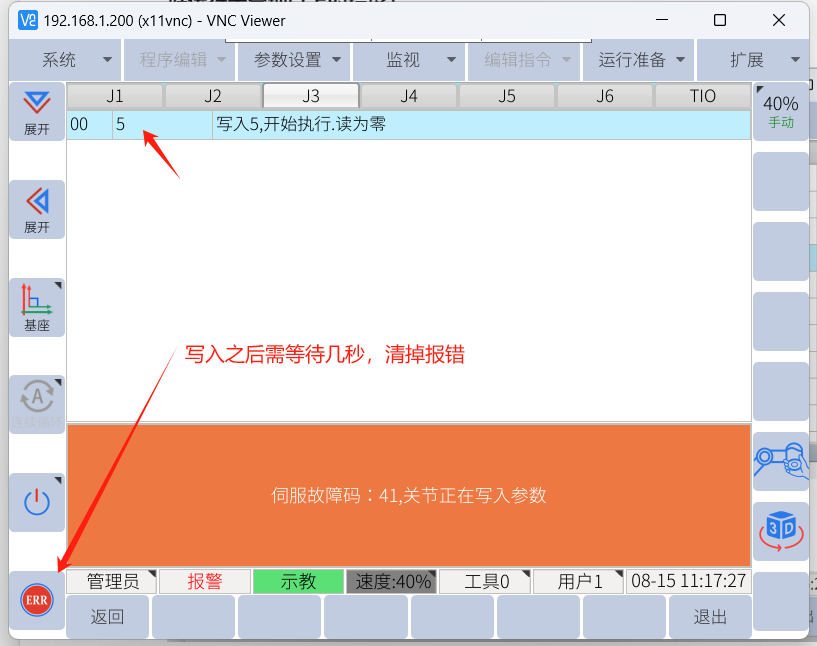
3. 寫入1開啟功能,然后退出即可。
4. 運(yùn)行項(xiàng)目的程序,伺服會(huì)針對(duì)此段程序自動(dòng)學(xué)習(xí)一組合適的抑制振動(dòng)的參數(shù)(最好運(yùn)行十分鐘以上的程序)。
4. 常見問題解答
1. 根據(jù)實(shí)際工具情況,合理設(shè)置機(jī)器人負(fù)載數(shù)據(jù)。
2. 要根據(jù)實(shí)際情況合理設(shè)定速度。
3. 調(diào)試過程中速度盡量放慢,碰撞檢測(cè)要打開,避免發(fā)生碰撞機(jī)器人發(fā)生抖動(dòng)。
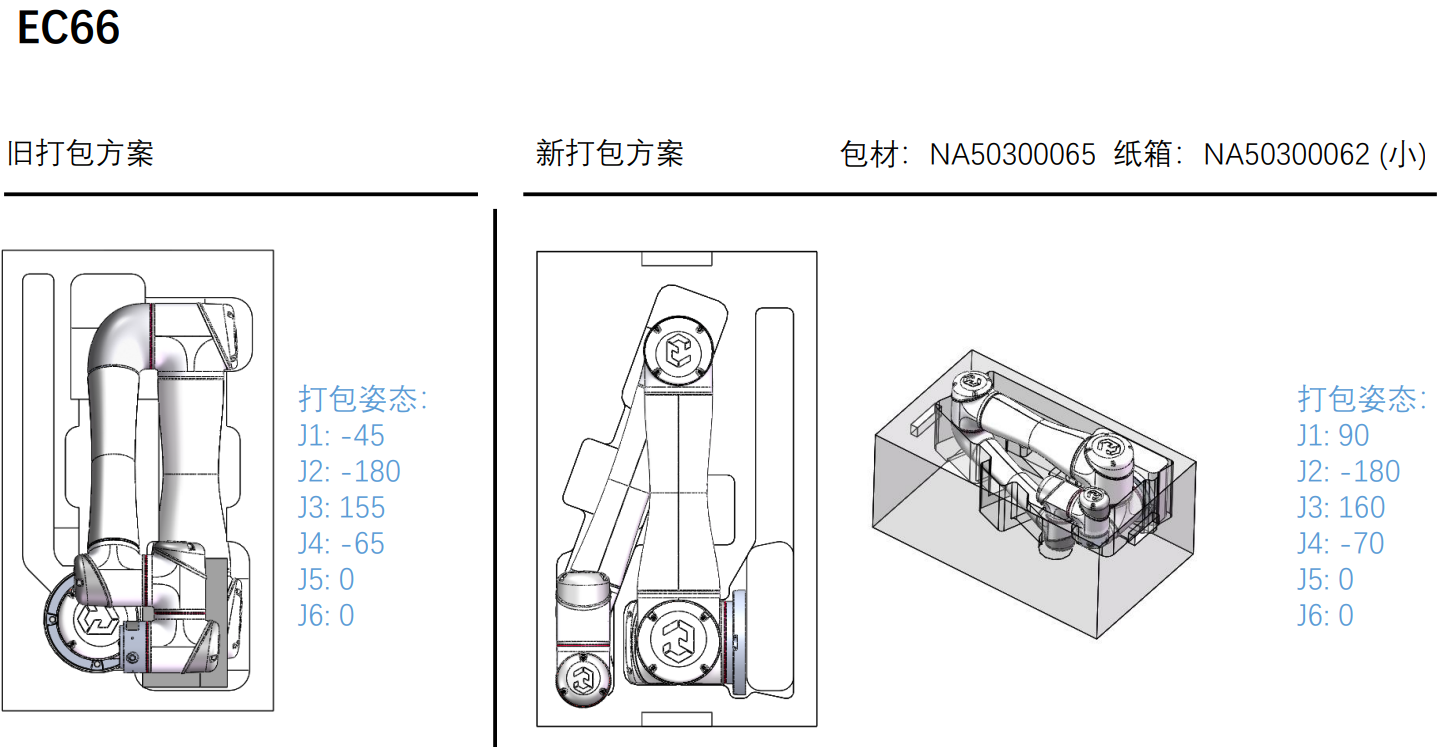
4. 運(yùn)輸過程中需要機(jī)器人的2、3軸不要受力,有支撐,合理的打包姿態(tài)運(yùn)輸能能夠有效的避免機(jī)器人抖動(dòng)。打包姿態(tài)如圖: